本文主要摘抄几位大佬的go语言笔记,用于平时复习记录用。
[TOC]
1、编译相关
有时候为了深入了解go runtime包相关的实现代码,需要查看go编译器转译的时候到底调用了什么函数,通过compile -S就可以查看到中间代码了。
1 | go tool compile -S main.go |
2、slice
slice的数据结构
1 | // runtime/slice.go |
slice的append
当原 slice 容量小于
1024的时候,新 slice 容量变成原来的2倍;原 slice 容量超过1024,新 slice 容量变成原来的1.25倍。(1.25倍不完全准确,实际是根据两个魔数数组来计算出来的)
slice的创建
1 | func makeslice(et *_type, len, cap int) slice |
创建slice返回的是slice结构体,因此slice作为函数的入参时,虽然slice中的成员的是数组指针,但还是会因为扩容而导致发生变化。因此,如果函数中可能会对slice进行扩容,则需要将slice指针最为入参。
slice的截取
由于slice的底层数据结构是数组,因此当slice发生截取时,如果被截取的初始slice修改了数组中的值,对应截取的slice中的值也会发生变化。
1 | package main |
3、map哈希表
map的数据结构
1 | type hmap struct { |
map的数据结构可以详细看一下饶全成的博客以及曹老师的博客中的内容,特别是高8位(定位桶中的key)和低位(定位哪个bucket桶)的部分。
map的创建
这里之所以要讲以下map的创建,是因为通过make创建出来的map其实是一个*hmap,是一个指针。因此在我们使用map的时候,特别是通过函数来传递map时,其实传递的是hmap指针,因此在函数中修改这个map是会实际对map进行修改的,这个和slice完全不一样。
1 | func makemap(t *maptype, hint int64, h *hmap, bucket unsafe.Pointer) *hmap { |
map的读写
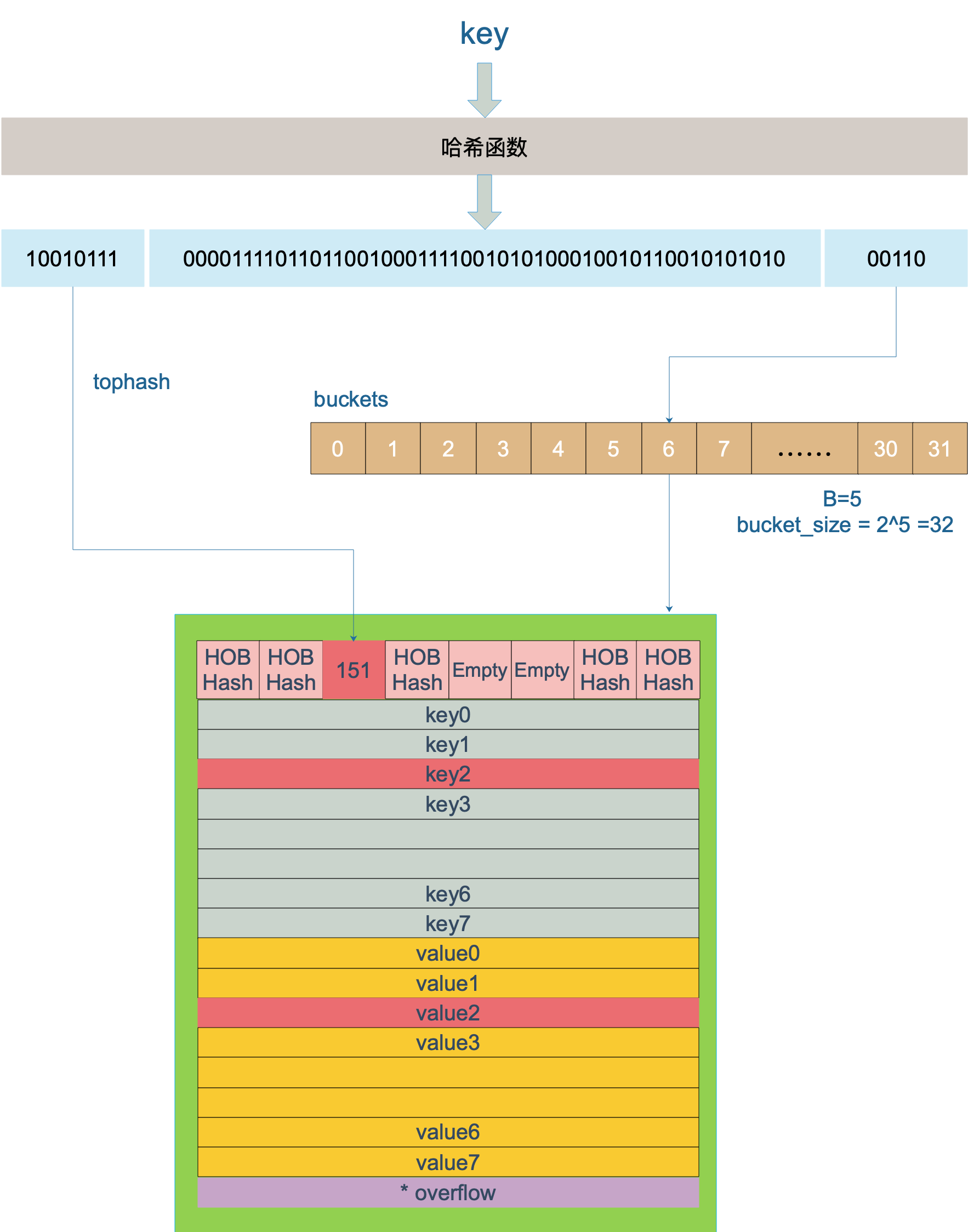
map中读写定位过程如下:
- 根据key的hash值的后
hmap.B位确定这个key落在哪个bucket桶 - 根据key的hash值的前8位确定桶(bmap)中的位置,写map时,如果桶中没有对应的前8位,则找一个空位置存储这个key的hash值的前8位,然后讲key和value分别存入,读取map时,找到对应的前8位之后,还会继续判断key是否相等,相等时才会返回对应的value
- 如果当前bmap中没有当前这个key(hash前8位),则到其扩展(
bmap.overflow)中继续寻找或者增加
以上过程可以通过下面这张图来表示(来自饶全成的博客):
map的扩容
map扩容的条件:
- 装载因子(
loadFactor := count / (2^B))超过阈值,源码里定义的阈值是 6.5。 - overflow 的 bucket 数量过多:当 B 小于 15,也就是 bucket 总数 2^B 小于 2^15 时,如果 overflow 的 bucket 数量超过 2^B;当 B >= 15,也就是 bucket 总数 2^B 大于等于 2^15,如果 overflow 的 bucket 数量超过 2^15。
哈希在存储元素过多时会触发扩容操作,每次都会将桶的数量翻倍。扩容过程不是原子的,而是增量触发,扩容期间每次最多只搬运 2 个 bucket。在扩容期间访问哈希表时会使用旧桶,向哈希表写入数据和删除数据时会触发旧桶元素的分流。
map的随机性
在go语言的规则中,通过range来遍历map中的数据时,其读取顺序时随机的,举一个简单的例子就可以明白:
1 | func main() { |
可以看到,输出的结果只是起始位置不一致,但是顺序都是一直的。
这是因为遍历map时,起始点的位置时随机产生的:
1 | // 生成随机数 r |
4、channel
Channel 分为两种:带缓冲、不带缓冲。对不带缓冲的 channel 进行的操作实际上可以看作“同步模式”,带缓冲的则称为“异步模式”。
- 同步模式下,发送方和接收方要同步就绪,只有在两者都 ready 的情况下,数据才能在两者间传输(后面会看到,实际上就是内存拷贝)。否则,任意一方先行进行发送或接收操作,都会被挂起,等待另一方的出现才能被唤醒。
- 异步模式下,在缓冲槽可用的情况下(有剩余容量),发送和接收操作都可以顺利进行。否则,操作的一方(如写入)同样会被挂起,直到出现相反操作(如接收)才会被唤醒。
channel发送和接收元素的本质
值的拷贝,通过channel中的循环数组实现队列
数据结构
1 | type hchan struct { |
buf 指向底层循环数组,只有缓冲型的 channel 才有。数组中的元素是类型本身,而不是这个类型的指针,也就是说,通过channel发送和接收都是值传递。注意是通过循环数组来缓存数据,其本质就是为了模拟队列~
sendx, recvx 均指向底层循环数组,表示当前可以发送和接收的元素位置索引值(相对于底层数组)。
lock 用来保证每个读 channel 或写 channel 的操作都是原子的。
sendq, recvq 分别表示被阻塞的 goroutine,这些 goroutine 由于尝试读取 channel 或向 channel 发送数据而被阻塞。需要体会的是,这两个队列不可能同时有值。
waitq 是 sudog 的一个双向链表,而 sudog 实际上是对 goroutine 的一个封装
1 | type waitq struct { |
channel的发送
- 如果当前 Channel 的 recvq 上存在已经被阻塞的 Goroutine,那么会直接将数据发送给当前的 Goroutine 并将其设置成下一个运行的协程;
- 如果 Channel 存在缓冲区并且其中还有空闲的容量,我们就会直接将数据直接存储到当前缓冲区 sendx 所在的位置上;
- 如果都不满足上面的两种情况,就会创建一个 sudog 结构并加入 Channel 的 sendq 队列,同时当前的 Goroutine 就会陷入阻塞等待其他的协程向 Channel 中发送数据以被唤醒;
channel的接收
数据时的几种情况:
- 如果 Channel 是空的,那么就会直接调用 gopark 挂起当前的 Goroutine;
- 如果 Channel 已经关闭并且缓冲区没有任何数据,chanrecv 函数就会直接返回;
- 如果 Channel 上的 sendq 队列中存在挂起的 Goroutine,就会将recvx 索引所在的数据拷贝到接收变量所在的内存空间上并将 sendq 队列中 Goroutine 的数据拷贝到缓冲区中;
- 如果 Channel 的缓冲区中包含数据就会直接从 recvx 所在的索引上进行读取;
- 在默认情况下会直接挂起当前的 Goroutine,将 sudog 结构加入 recvq 队列并等待调度器的唤醒;
1 | // 向一个非缓冲型的 channel 发送数据、从一个无元素的(非缓冲型或缓冲型但空)的 channel |
这里涉及到一个 goroutine 直接写另一个 goroutine 栈的操作,一般而言,不同 goroutine 的栈是各自独有的。而这也违反了 GC 的一些假设。为了不出问题,写的过程中增加了写屏障,保证正确地完成写操作。这样做的好处是减少了一次内存 copy:不用先拷贝到 channel 的 buf,直接由发送者到接收者,没有中间商赚差价,效率得以提高,完美。
channel的关闭
原则:不要从一个 receiver 侧关闭 channel,也不要在有多个 sender 时,关闭 channel。
有两个不那么优雅地关闭 channel 的方法:
- 使用 defer-recover 机制,放心大胆地关闭 channel 或者向 channel 发送数据。即使发生了 panic,有 defer-recover 在兜底。
- 使用 sync.Once 来保证只关闭一次。
只有一个发送者或者只有一个接收者的情况,通过只有一个角色去关闭;
对于多个发送者和多个接收者的情况,需要增加一个stopCh用来专门传递关闭信号。
| 操作 | nil channel | closed channel | not nil, not closed channel |
|---|---|---|---|
| close | panic | panic | 正常关闭 |
| 读 <- ch | 阻塞 | 未读取的缓存或者对应类型的零值 | 阻塞或正常读取数据。缓冲型 channel 为空或非缓冲型 channel 没有等待发送者时会阻塞 |
| 写 ch <- | 阻塞 | panic | 阻塞或正常写入数据。非缓冲型 channel 没有等待接收者或缓冲型 channel buf 满时会被阻塞 |
需要注意的是,已经关闭的channel是可以从中获取数据的,如果这个channel中还有缓存的数据,那么就会继续返回缓存数据,否则直接返回0,其实也就是这个类型的0值。通过第二个返回值来判断是否已经关闭。但是已经关闭的channel不能往里面写,会panic。
问题:
1、一个channel有多个接收者时,信息是如何给各个接受者传递的,接收者的概率是一样的吗?
答:由于channel的接收者存在recvq中,信息是根据recvq队列中的先后顺序来发送给接收者的,因此接收者获取到信息是根据自己挂起(也就是当前协程进入channel的recvq队列)的顺序来获取。
2、已经关闭的channel中如果还有数据,接收者还能从中继续过去吗?
答:可以
如何优雅地关闭channel
https://go101.org/article/channel-closing.html
5、select语句
在编译期间,Go 语言会对 select 语句进行优化,它会根据 select 中 case 的不同选择不同的优化路径:
- 空的 select 语句会被转换成调用
runtime.block直接挂起当前 Goroutine; - 如果 select 语句中只包含一个 case,编译器会将其转换成
if ch == nil { block }; n;表达式;- 首先判断操作的 Channel 是不是空的;
- 然后执行 case 结构中的内容;
- 如果 select 语句中只包含两个 case 并且其中一个是 default,那么会使用
runtime.selectnbrecv和runtime.selectnbsend非阻塞地执行收发操作; - 在默认情况下会通过
runtime.selectgo获取执行 case 的索引,并通过多个 if 语句执行对应 case 中的代码;
在编译器已经对 select 语句进行优化之后,Go 语言会在运行时执行编译期间展开的 runtime.selectgo 函数,该函数会按照以下的流程执行:
- 随机生成一个遍历的轮询顺序
pollOrder并根据 Channel 地址生成锁定顺序 lockOrder; - 根据 pollOrder 遍历所有的 case 查看是否有可以立刻处理的 Channel;
- 如果存在,直接获取 case 对应的索引并返回;
- 如果不存在,创建 runtime.sudog 结构体,将当前 Goroutine 加入到所有相关 Channel 的收发队列,并调用 runtime.gopark 挂起当前 Goroutine 等待调度器的唤醒;
- 当调度器唤醒当前 Goroutine 时,会再次按照 lockOrder 遍历所有的 case,从中查找需要被处理的 runtime.sudog 对应的索引;
select 关键字是 Go 语言特有的控制结构,它的实现原理比较复杂,需要编译器和运行时函数的通力合作。
6、interface
主要用来实现duck模型,其中需要重点注意的是,interface的指针接收者无法接收初始化者是结构体的情况。如:
1 | type Duck interface { |
数据结构
interface根据其定义的方法是否为空分为两种不同的类型。
在go的底层实现中,空的interface{}是单独对待的,它的底层数据结构为eface:
1 | type eface struct { // 16 字节 |
由于 interface{} 类型不包含任何方法,所以它的结构也相对来说比较简单,只包含指向底层数据和类型的两个指针。从上述结构我们也能推断出 — Go 语言的任意类型都可以转换成 interface{}。
而普通包含了方法的interface的底层数据结构是iface:
1 | type iface struct { // 16 字节 |
这里的itab是最重要的字段:
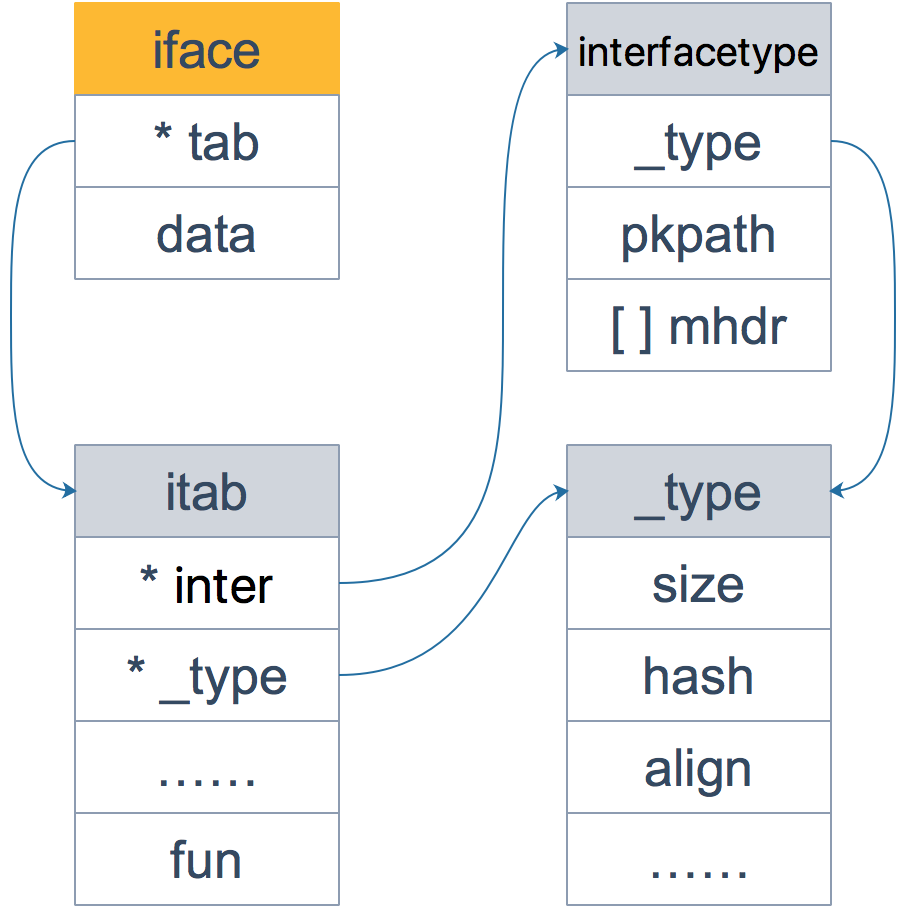
1 | type itab struct { // 32 字节 |
其中:
- inter这个interfacetype是一个对 _type 类型的简单封装
- _type 字段是 Go 语言类型在运行时的内部结构,每一个 _type 结构体中都包含了类型的大小、对齐以及哈希等信息
- hash 字段其实是对 _type.hash 的拷贝,它会在从 interface 到具体类型的切换时用于快速判断目标类型和接口中类型是否一致
- fun 数组其实是一个动态大小的数组,如果如果当前数组中内容为空就表示 _type 没有实现 inter 接口
iface的整体数据结构如下:
interface类型的断言其实就是通过itab中的类型的hash值来判断的,这个字段既在itab._type.hash中,也在itab.hash中,两者其实是一致的。
从上面的数据结构图中可以看到,_type多次出现,这个成员保存了最关键的数据,其结构体定义如下:
1 | type _type struct { |
需要注意的是,_type中保存的是数据的实际类型,例如实例的类型是os.File,即使是通过os.Reader传递过来的,其interface的_type中存的仍然是os.File。
interface与nil
只有当iface中的tab和data都为空时,interface才为nil。因此,即使一个只被类型赋值的interface也不为空。
接口值的零值是指动态类型和动态值都为 nil。当仅且当这两部分的值都为 nil 的情况下,这个接口值就才会被认为 接口值 == nil。
类型断言
interface常用的方式就是用来进行类型断言,当多个类型都实现了相同的interface时,为了能区分实际的类型,需要通过断言来判断。
<目标类型的值>,<布尔参数> := <表达式>.( 目标类型 ) // 安全类型断言
<目标类型的值> := <表达式>.( 目标类型 ) //非安全类型断言
如前所述,类型断言本质上就是通过类型的hash值来判断,go runtime中会有一个全局的hash表用来保存常用的类型hash。
7、反射
反射的法则
- 从接口值可反射出反射对象;
- 从反射对象可反射出接口值;
- 要修改反射对象,其值必须可设置;(利用反射机制,对于结构体中未导出成员,可以读取,但不能修改其值。)
需要注意的是,反射一般是和interface一起配合使用的。
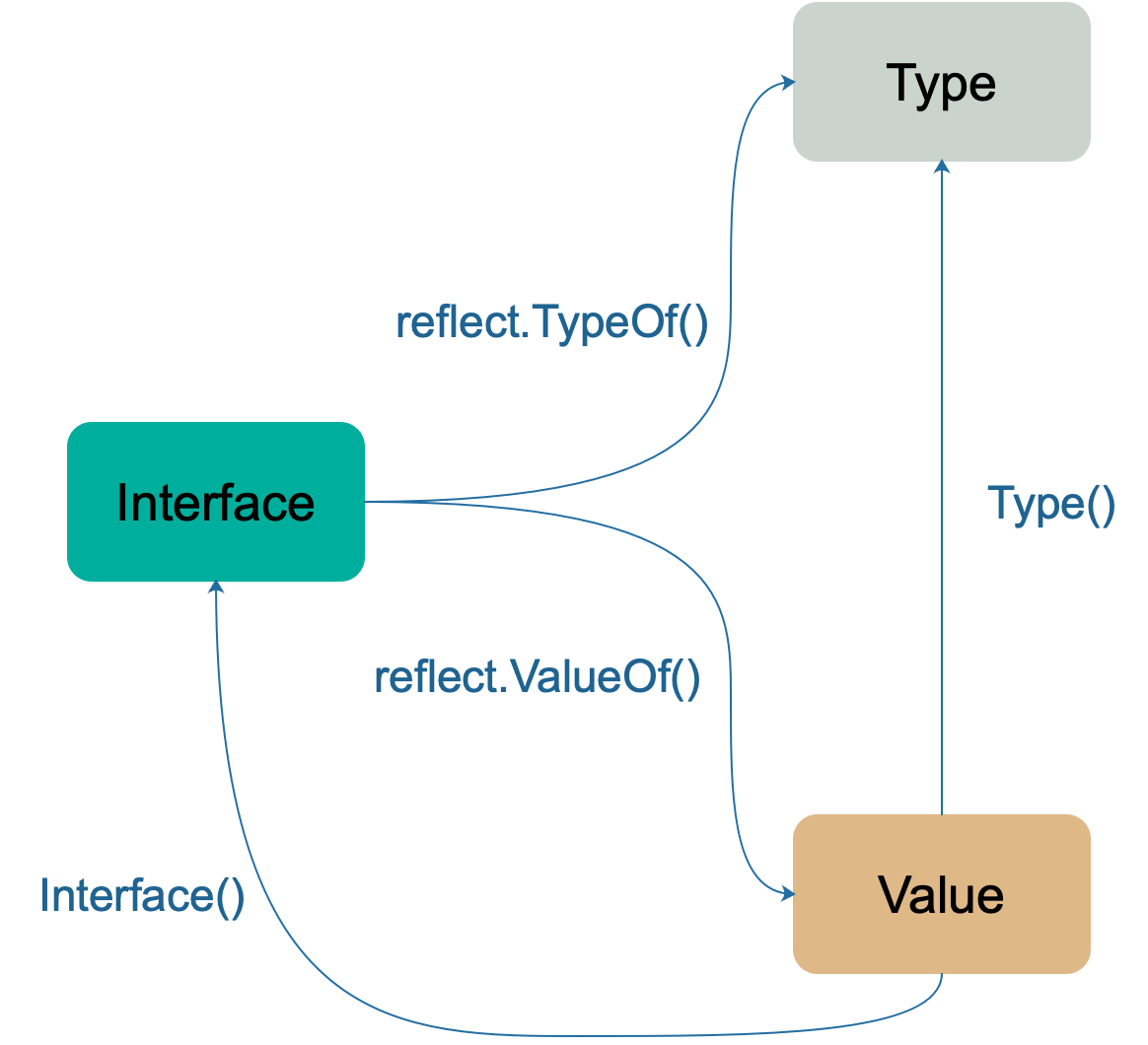
reflect 包里定义了一个接口和一个结构体,即 reflect.Type 和 reflect.Value,它们提供很多函数来获取存储在接口里的类型信息。
reflect.Type 主要提供关于类型相关的信息,所以它和 _type 关联比较紧密;reflect.Value 则结合 _type 和 data 两者,因此程序员可以获取甚至改变类型的值。reflect 包中提供了两个基础的关于反射的函数来获取上述的接口和结构体:
1 | func TypeOf(i interface{}) Type // 返回值Type其实是一个interface |
TypeOf 函数用来提取一个接口中值的类型信息。由于它的输入参数是一个空的 interface{},调用此函数时,实参会先被转化为 interface{}类型。这样,实参的类型信息、方法集、值信息都存储到 interface{} 变量里了。
1 | func TypeOf(i interface{}) Type { |
ValueOf 函数的返回值 reflect.Value 表示 interface{} 里存储的实际变量,它能提供实际变量的各种信息。相关的方法常常是需要结合类型信息和值信息。例如,如果要提取一个结构体的字段信息,那就需要用到 _type (具体到这里是指 structType) 类型持有的关于结构体的字段信息、偏移信息,以及 *data 所指向的内容 —— 结构体的实际值。
1 | func ValueOf(i interface{}) Value { |
通过 Type() 方法和 Interface() 方法可以打通 interface、Type、Value 三者。Type() 方法也可以返回变量的类型信息,与 reflect.TypeOf() 函数等价。Interface() 方法可以将 Value 还原成原来的 interface。
主要参考
draveness的博客:https://draveness.me/golang/
饶全成的博客:https://www.qcrao.com/